
 产品:40
产品:40
 联系我们
联系我们

工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、高效、环保和安全。
主营ABB、库卡KUKA、安川YASKAWA、发那科FANUC、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口品牌机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区博园路1333号1栋7层
--------------------------------------------------------------------------------------------------------------------------------------------------
ABB机器人概述
近年来,机器视觉技术在工业生产中得到了广泛的应用。 在工业机器人应用领域,机器视觉已广泛应用于工件的特征检测以及机器人的位置和姿态引导。 市场上大部分的机器人厂商也在机器人控制器中开放视觉集成接口,使机器人可以直接与智能相机数据交互。 在机器人仿真过程中,除了实际的机器视觉应用外,还需要进行机器视觉仿真。 针对这一问题,我们将介绍使用机器视觉实现机器人姿态引导操作的Robotstudio软件。
机器人与视觉系统创建
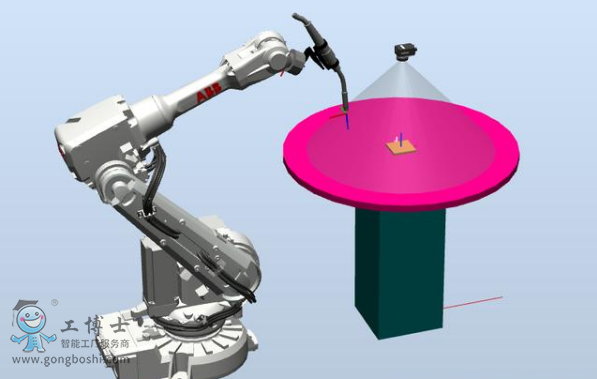
工件位置创建一个随机生成的模拟环境,添加一个IRB2600机器人,机器人工具和摄像设备中使用的RobotStudio软件自带***AW_Gun_PSF_25,内置视觉相机Cam00X库。用“模式”菜单中的“锥”建模工具来创建一个锥体,锥和透明度修饰,摄像头作为光源。
将焊***安装到机器人上,相机、相机光源分别放置到合适自己位置处,并创建智能机器人技术控制管理系统,机器人与视觉信息系统设计创建工作完成后,如下图所示。
机器人工件坐标系添加
对于机器人位置和姿态的视觉引导,大多数品牌机器人都是基于工件坐标系的,ABB机器人也不例外,所以这里还需要增加一个工件坐标系。
在“基本设置”菜单栏,下拉菜单中的“其他”命令按钮,单击“创建工件坐标”,弹出创建工件坐标,在“三用“点采取建立一个框架”用户坐标系 - 点”的方法,在所述工作表面的中心点,以创建工件坐标系,则坐标与世界一致轴方向的坐标系。
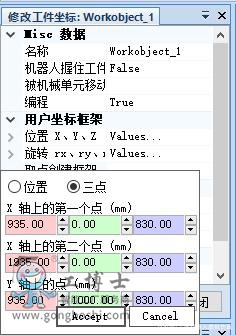
工件坐标系可以创建工作完成后,使用“同步”功能设计将在系统仿真技术环境中创建的工件坐标系之间以及管理工具坐标系同步到机器人通过控制器中,同步时二者所属的模块均选择“Module1”。
机器人位置和姿态变量声明
在“RAPID”菜单栏的RobotStudio软件,开放模块1机器人程序模块,并在一个位置上的编辑窗口的程序代码移位机器人声明的变量X,Y轴和旋转PosXY变量Z轴OrientRz,完整变量声明代码,如下面。
机器人进行视觉可以引导Smart组件创建
在前一时期创建的工件位置,将两个快速可变子对象组件添加到随机生成仿真环境的智能组件中。 一种用于将视觉检测到的工件位置偏移数据发送给机器人,另一种用于将视觉检测到的工件姿态偏移数据发送给机器人。
组件的两个子对象属性RapidVariable配置为使视觉检查被发送到工作偏移数据到在机器人程序PosXY,OrientRz中声明的数据变量。
对于一个相机的控制,这里可以使用2个LogicGate子对象进行组件、1个Show子对象主要组件、1个Hide子对象不同组件。
使用Show和Hide子对象组件显示/隐藏摄像机光源,实现摄像机光源闪烁仿真效果,两个属性参数配置如下。
用两个部件作为一个子对象LogicGate延时继电器,照相机控制的时间间隔来实现闪烁光源1S,这两个参数的性质如下。
在Smart组件中删除自己之前可以创建的定时器子对象进行组件,添加1个脉冲信号系统输出子对象主要组件LogicSplit。然后再通过分别创建1个数字量输入数据信号di1与1个数字量输出一个信号do1,用来管理作为一种视觉文化引导Smart组件的控制与反馈信号。
在设置完成后,分别设置修改后的视觉引导智能组件属性传输关系和信号控制逻辑,如下图所示。
机器人示教编程
在机器人控制器,分别创建具有数字输出信号DO1数字输入信号DI1,它可以是物理信号,伪信号可以被用于连接控制智能组件,所述反馈信号。
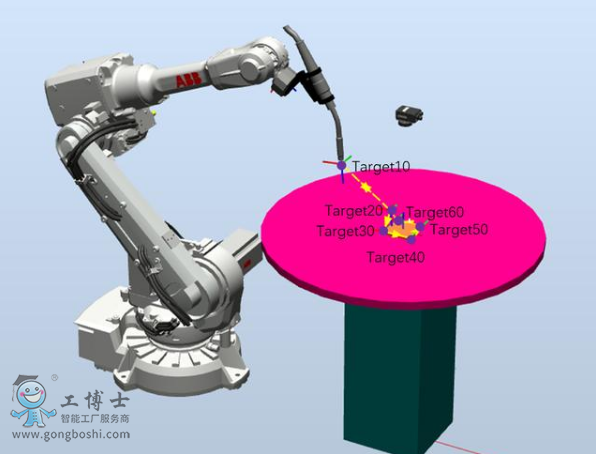
在Robotstudio软件的仿真技术环境中对机器人可以进行示教编程,机器人系统运行发展轨迹如下图所示,示教编程教学过程中我们除了Target10点以外,其他企业工作点全部通过使用自己创建的工件坐标系Workobject_1,工具以及全部学生使用焊***工具。
将模拟环境中完成的机器人程序同步到机器人控制器,然后在“RAPID”菜单栏中打开。 完整的程序代码如下图所示。
视觉引导机器人工作站模拟运行
在“工作站逻辑”中,将视觉可以引导Smart组件的控制、反馈信息信号与机器人系统控制器的数字量输出一个信号、数字量输入数据信号之间互相连接。
同时,检查“视觉引导”智能部件、机器人控制器,并在“仿真设置”中将机器人“运行模式”设置为“连续“。
运行模拟的工作站的视觉引导的机器人仿真,工件可以在台面随机改变照相机拍摄工件的姿态检测中可以看出,机器人的工件位置,工件是根据移动操作处理引导数据,仿真结果如图节目。

了解更多ABB机器人