
 产品:40
产品:40
 联系我们
联系我们

工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、高效、环保和安全。
主营ABB、库卡KUKA、安川YASKAWA、发那科FANUC、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口品牌机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区博园路1333号1栋7层
--------------------------------------------------------------------------------------------------
定义工具座标系
• N(N>=4)点法- 机器人 TCP 通过N种不同姿态同某定点相碰, 得出多组解, 通过计算得出当前 TCP 与机器人手腕中心点 ( tool0 ) 相应位置, 座标系方向与 tool0 一致。
• TCP&Z法- 在N点法基础上, Z点与定点连线为座标系 Z 方向。
• TCP&X,Z法- 在N点法基础上,X点与定点连线为座标系 X 方向, Z点与定点连线为座标系 Z 方向。
• 机器人工具座标系是由工具中心点 TCP 与座标方位组成。
• 机器人联动运行时, TCP 是必需的。
• 机器人程序支持多个 TCP, 可以根据当前工作状态进行变换。
• 机器人夹具被更换, 重新定义 TCP 后, 可以不更改程序, 直接运行。
• 可以通过工具座标系转换来定义机器人工作位置。
按 ABB 进入菜单界面

在菜单界面中,选择 Program Data
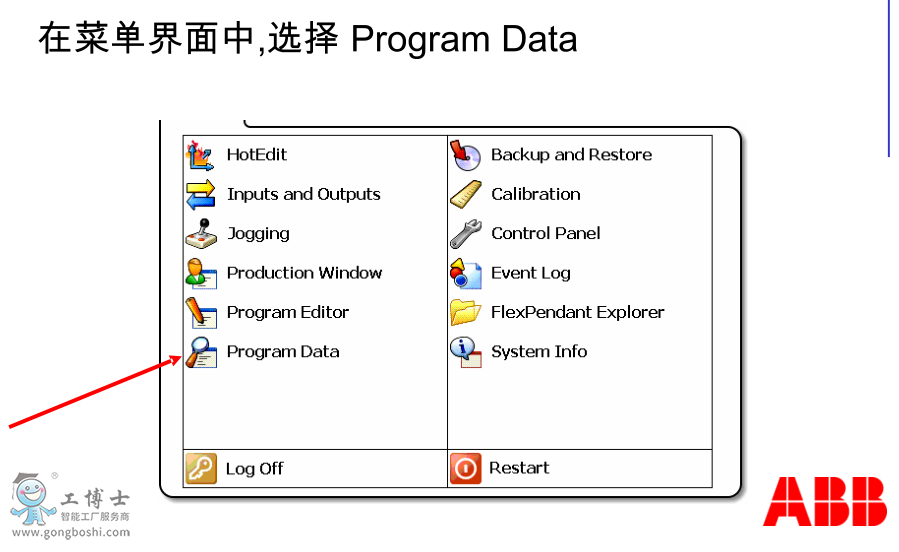
• 在Program Data 中选择tooldata, 进入工具坐标系窗口
• 按住功能键 New 新建一个Tooldata
• 按住所选工具, 直接进入当前工具编辑窗口 。
• Mass
工具重量, kg。
• cog: x y z
工具重心位置, mm。
• aom: ix iy iz
工 具 X 轴 、Y 轴 、
Z 轴惯性矩, kgm 2 。
• 选择新定义的ToolData 后, 在功能键上选择Edit, 在弹出菜单中选择Define。
• 按住 选择定义方法和点数
• 使用功能键 Modify position 记录机器人相应位置, ***后用 OK 键确认。
• 按住功能键 New 新建一个Tooldata
• 按住所选工具, 直接进入当前工具编辑窗口 。
• Mass
工具重量, kg。
• cog: x y z
工具重心位置, mm。
• aom: ix iy iz
工 具 X 轴 、Y 轴 、
Z 轴惯性矩, kgm 2 。
• 选择新定义的ToolData 后, 在功能键上选择Edit, 在弹出菜单中选择Define。
• 按住 选择定义方法和点数
• 使用功能键 Modify position 记录机器人相应位置, ***后用 OK 键确认。
